몇 년마다 가끔, 기존의 기술로 해결하지 못했던 것을 해결하며 기존의 비즈니스 시장 구도 자체를 바꿔버리는 기술이 툭하니 등장하곤 합니다. 이를 와해성 기술(Desruptive Technology)라고 부르고, 이러한 와해성 기술을 빨리 캐치 업하고 이를 상품화한 기업만이 살아남습니다.
문제는 처음 와해성 기술이 나왔을 때, 이게 과연 시장을 바꿀만한 기술인지, 과연 성공해서 살아남을 수 있는 기술인지 판단이 쉽지 않습니다. 처음 이러한 기술이 나올 때는 가격도 비싸고, 여러 문제점 투성이기 때문입니다.
돌이켜 생각해보면 디지털카메라가 그랬고(이로 인해 필름, 카메라 산업 자체가 붕괴/재편되었음), 스마트 폰이 그랬고, SSD가 그랬습니다.
2020.7월 현재, UWB 기술이 그런 조짐을 보입니다.
이 글을 통해, UWB가 과연 와해성 기술이 될지 확인하시기 바랍니다.
UWB 기술이란 무엇인가?
UWB(Ultra Wide Band, 초광대역) 기술은 500 MHz에 이르는 매우 넓은 주파수 대역폭(Bandwidth)을 이용하는 무선 통신 기술로, 초광대역의 주파수 대역폭을 사용하기 때문에 매우 세밀한 거리측정이 가능해서, 기존 WIFI나 블루투스로 시도했으나 잘 안되었던 인도어 위치 측정, 자동차 키 등에 쓰일 수 있을 것으로 각광받는 기술입니다.

출처: The Story Behind UWB Technology and Indoor Positioning
왜 UWB 기술이 각광받는가?
어떤 사람의 위치 정보를 안다는 것은 매우 중요한 정보입니다. 이로부터 찾아낼 수 있는 비즈니스 기회가 너무나 많습니다.
어떤 광고판 앞을 지나는 사람이 남자인지 여자인지만 알아도 그에 대한 광고판의 내용을 바꿔서 광고의 적중률을 높일 수 있고, 지금 집 현관 앞으로 다가오는 사람이 누구인지를 알면 현관문을 자동으로 열 수도 있습니다. 또한, 현재 빌딩 내 각 영역마다 몇 명의 사람이 있는지를 안다면 그에 맞는 공조/조명을 제어해서 전기료를 절약할 수 있습니다.
위에서 열거한 케이스 말고도 누군가의 위치와 거리를 알 수 있다면 할 수 있는 비즈니스는 매우 많습니다.
이러한 비즈니스 요구 중에서, 아웃-도어(out-door)에서 위치를 비교적 정확하게 알 수 있게 하는 기술이 GPS이고, 이 기술은 어느 정도 정착화되었습니다. 차량용 내비게이션에 이용되고 있고, 미사일의 타깃 목표를 설정하는 데에도 이용됩니다. 목표하는 바를 GPS 기술이 다 커버합니다. 단지 이 GPS를 이용하기 위해서 GPS 위성이 필요하고 이를 몇몇 국가, 특히 미국이 독점하고 있어서, 독점에 의한 서비스 중단이 우려될 뿐입니다.
물론 더 세밀한 위치를 파악하기 위한 요구가 있으나, 이는 GPS를 이용해서 어떻게 더 정확하게 위치 값을 찾아낼까로 해결방안이 진행되고 있으며, GPS를 대체하는 또 다른 무슨 기술이 강구되고 있지는 않습니다.
그러나, 인-도어(in-door)에서의 위치 파악에 대해서는 얘기가 다릅니다. 아직까지 요구되는 비즈니스 내용을 충족하기 위한 마땅한 기술이 없습니다. (인-도어에서 GPS가 아닌 다른 기술이 필요한 이유는, 지붕이 있거나 폐쇄된 in-door환경에서는 GPS 위성 신호를 받을 수 없기 때문입니다.)
인-도어 환경에서의 위치 파악을 위해 여러 기술들을 이용한 시도가 이루어졌습니다.
이 중에서 무선 통신을 이용해서 어떤 객체/사람의 위치를 파악하려는 노력으로, WiFi와 블루투스가 가장 많이 연구되었고 실제로 서비스도 이루어지고 있습니다.
그러나, WIFI나 블루투스를 이용한 모든 방법들이 그리 만족스러운 결과를 보이지 못하고 있습니다.
이유는 너무나 측정 오차가 크기 때문입니다.
WIFI나 블루투스에서 거리를 측정할 수 있는 방법은, 해당 전파의 세기를 읽는 방법밖에 없습니다. 전파의 세기가 신호를 주고받는 두 장치의 거리에 반비례한 것을 이용하는 것입니다. 즉, 거리가 멀면 신호가 약하고, 거리가 가까우면 신호 강도가 센 것을 이용해서 비례식을 세우고, 해당 전파 강도에 대한 거리를 구하는 것입니다. 그러나, 문제는 전파의 강도가 중간에 장애물이 있거나 주변에 반사되는 물체들이 있을 때, 현저히 변한다는 데 있습니다.
블루투스의 측정 거리 오차 심함
예를 들어, 블루투스의 경우 중간에 손바닥 같은 장애물이 있을 때, 강도 세기는 없을 때 대비 500% 이상 차이 날 수도 있습니다.
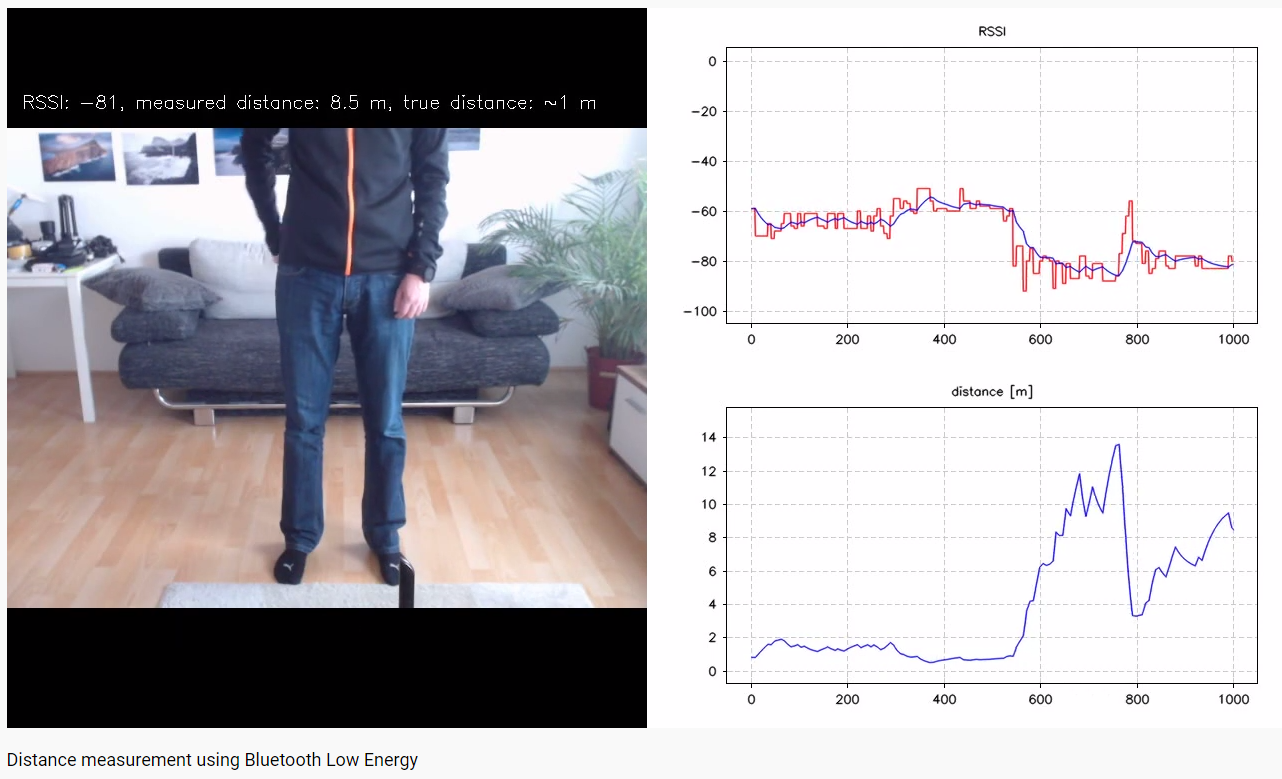
위 동영상에서 테스트한 바에 따르면 2m 떨어진 곳에서 가만히 서 있는 상태에서, 폰을 손에 쥐었다가 앞주머니에 넣거나 뒷 주머니에 넣는 동작만을 했을 때, 블루투스에 의해 측정된 거리를 보면, 14m까지 떨어져 있다고 보일 때도 있습니다. 오차가 무려 600%까지 발생한 것입니다.
WiFi에서의 측정 거리 오차 심함
WiFi를 사용했을 때 거리 오차를 보면, AP(Access Point)를 8개를 사용하더라도 평균 약 1m 정도의 오차가 발생합니다.
블루투스보다 낫긴 하지만 1m의 오차를 보이기에, 이 정도의 정확성을 가지고는 비교적 위치가 정확하지 않아도 되는 제한된 케이스에 대해서만 사용 가능할 것입니다.
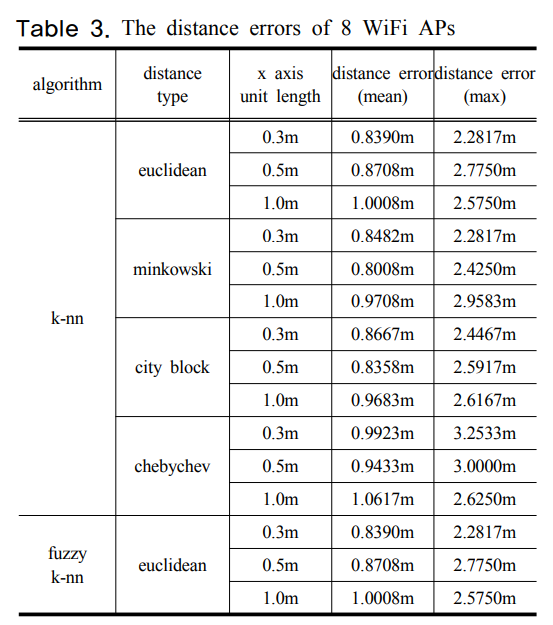
출처: WiFi 핑거프린트를 이용한 지하철 위치 추적 정확성 향상을 위한 연구(http://jkais99.org/journal/Vol17No1/p01/1ml/1ml.pdf)
UWB로 매우 정밀한 위치 측정 가능
반면에 UWB의 경우는 편균 약 10cm의 오차로, 블루투스나 WiFi에 비해 10배 이상 좋은 성능을 보입니다.

출처: Evaluation of positioning and ranging errors for UWB indoor applications(http://ceur-ws.org/Vol-2498/short30.pdf)
UWB에 의한 거리 측정 방법
UWB는 Bluetooth나 WiFi가 RSSI(Received Signal Strength Indication)이라 불리는, 도달한 전파 강도에 따른 비례식으로 거리를 계산하는 것과 달리, 두 지점 간에 UWB 전파가 이동하는데 걸리는 시간을 이용해서 거리를 측정합니다.
$$ 속도 = {거리} / {시간}, 거리 = 속도 \times {시간} $$
전파의 속도는 빛의 속도와 같고, 공기 중에서 $2.997 \times 10^8 m/s$로 속도가 일정합니다. 따라서, 이동 시간만 정확히 측정된다면 두 지점 사이의 거리가 계산됩니다.
여기서 두 지점 사이의 이동 시간을 ToF(Time of Flight)라고 한다면,
$$ 이동거리(d) = 광속(C) \times ToF $$
예를 들어 $ToF = 4ns$라면,
$$ 이동거리(d) = 2.997 \times 10^8 \times 4 \times 10^{-9} = 1.198 m $$
따라서, ToF를 안다면 두 지점 사이의 거리를 계산할 수 있기에, ToF를 알아내는 것이 관건입니다.
두 지점 사이의 ToF(Time of Flight) 구하는 방법
어떤 기준이 되는 곳에 위치시키는 것을 앵커(Anchor)라 하고, 이 앵커와의 거리를 재려고 하는 이동하는 물체에 부착되는 것을 태그(Tag)라고 할 때, 태그가 전파를 쏘고 앵커가 그 전파를 받을 때는 시간 차가 발생합니다. 전파가 태그와 앵커 사이의 거리를 이동할 때 시간이 걸리기 때문입니다. 이를 ToF(Time of Flight)라고 합니다.
만약 태그가 전파를 폴링 하고(주기적으로 신호를 쏘는 것을 말함), 앵커가 그 폴링 전파를 받은 후 응답을 한다면, 태그가 전파를 쏘고 응답을 받을 때까지의 시간 차 $T_{poll}$과 앵커에서 신호를 받고 응답할 때까지의 시간 차인 $T_{reply}$를 빼면, 2개의 ToF 시간이 되고, 이 2 개의 ToF에 해당하는 값을 2로 나누면 ToF가 계산될 수 있습니다. (아래 그림 참조)
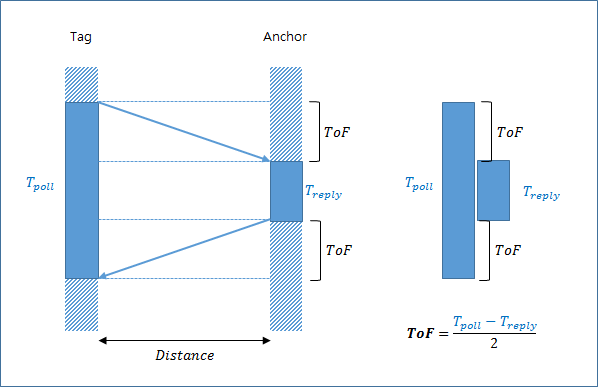
위 그림은 ToF의 계산을 설명하기 위해 개념적으로 꾸민 프로토콜이고, 태그와 앵커의 클럭 주파수 차이에서 발생하는 오차를 줄이기 위해 아래와 같은 프로토콜이 사용됩니다.
SDS-TWR(Symmetric Double-Side Two Way Ranging) 프로토콜

- 태그는 앵커에게 폴링 메시지를 보냄. 이때 보내는 시간은 t1
- 앵커는 폴링 메시지를 받으면(t2), 응답을 보냄(t3). 이때 신호를 받고 나서 처리를 위한 지연시간(${t}_{rsp\_ a}$) 발생함: $t_{rsp\_ a} = t3-t2$
- 태그는 앵커로부터의 응답 메시지를 받으면(t4), 태그 자신이 폴링 메시지를 보낼 때의 시간을 기준으로 해서 응답을 받을 때까지의 시간인 Round-Trip 시간($T_{tag}$)을 계산: $T_{tag} = t4 - t1$
- 태그는 자신이 계산한 Round-Trip 시간($T_tag$)을 앵커에게 전송(t5). 이때 지연시간 ${t}_{rsp\_ t}$ 발생: ${t}_{rsp\_t} = t5-t4$
- 앵커는 $T_{tag}$을 받아서(t6), 2번에서 기록한 t3에 대한 타임스탬프를 기준으로 해서 $T_{tag}$을 받을 때까지의 라운드 트립 시간 $T_{anchor}$를 계산: $T_{anchor} = t6-t3$
- 앵커에서, 태크와 앵커 사이의 이동 시간인 tof(Time of Flight)가 계산됨

ToF의 계산식이 왜 이렇게 되는지는 위 그림에서 오른쪽 편 그림을 보면 이해가 될 것입니다.
ToF에 해당하는 것은 동그라미로 된 번호 1~4번이고, $(1번+2번)={T}_{tag} - (t3-t2)$이고, $(3번+4번)={T}_{anchor}-(t5-t4)$가 되고, 이 4개의 ToF를 다시 4로 나누면 ToF가 되는 것입니다.
ToF(Time of Flight)로부터 거리 계산
전파의 속도는 빛의 속도와 같고, 공기 중에서 $2.997 \times 10^8 m/s$로 속도가 일정합니다.
따라서, 전파가 ToF만큼 이동한 거리는, $$ 이동거리(d) = 광속(C) \times ToF $$
예를 들어 $ToF = 4ns$라면,
$$ 이동거리(d) = 2.997 \times 10^8 \times 4 \times 10^{-9} = 1.198 m $$
UWB가 미세 거리 측정이 가능한 이유
Bluetooth나 WiFi가 거리 측정을 위해서 RSSI(Received Signal Strength Indication)라 불리는, 도달한 전파 강도에 따른 비례식으로 거리를 계산해내는 방식을 사용하고 있고, 이 RSSI 방식은 주변 지형물에 의한 반사, 방해물에 의한 간섭 등으로 그 정확성이 매우 떨어집니다.

블루투스에서의 거리는 측정된 RSSI에 비례하는 식으로부터 계산됩니다.
$ distance\quad =\quad { 10 }^{ \frac { MP-RSSI }{ 10N } } $
MP: 1m 거리에서 예상되는 RSSI 값
N: 환경에 따른 보정 값. 보통 2~4 사이 값
UWB는 거리 측정을 위해 RSSI를 사용하는 것이 아니고, '전파의 이동 시간'을 이용하고, 이 이동 시간을 세밀하게 잴 수 있도록 광대역 폭의 주파수를 사용하기 때문에 미세한 거리측정이 가능합니다.
$ 거리 = 전파속도 \times 이동거리 $
세밀한 시간 측정을 위해서 광대역폭의 주파수를 사용한다고 했는데 그 이유를 설명하겠습니다.
전파의 속도가 너무 빠르다
전파는 빛의 속도와 같고, 이는 1초에 약 30만 킬로미터를 이동합니다.
$1ns(=10^{-9}초)$에 이동하는 거리는 약 30cm
따라서, 전파의 이동거리를 센티미터 단위로 재려면 1 나노초보다 더 빠르게 전파를 캐치할 수 있어야 합니다.
전파의 모양은 사인 파
디지털 회로에서, 전파를 캐치업한다는 것은, 전파의 세기를 읽어서 일정 값 이상이 되는 값을 알 수 있어야 함을 말합니다. 즉, 우리가 어떤 아날로그 파형으로부터 0, 1의 디지털 값을 알아낸다는 것은, 파형이 낮은 곳에서 높은 곳으로 올라가서, 일정 값 이상으로 올라갈 때를 알아내는 것입니다.
여기서 문제는 파형이 사인파이기에 상승 시간(rise time)이 존재한다는 것입니다. 계단처럼 어느 순간에 갑자기 올라가지 않습니다.
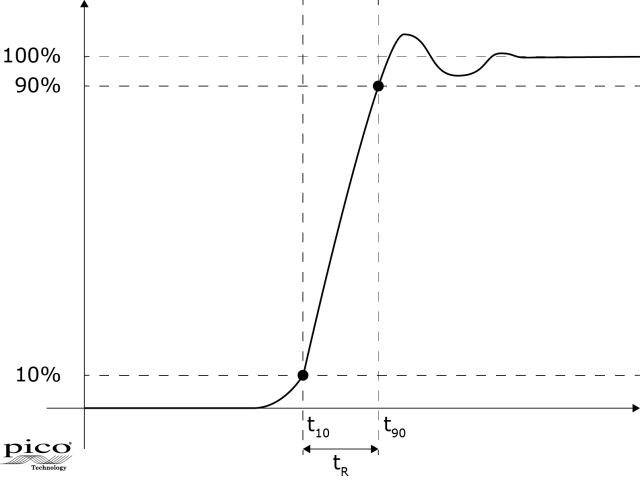
| 상승시간(Rise time) 신호의 낮은 전압 상태(10%)에서 높은 상태(90%)까지 올라가는 데 걸리는 시간 |
이 상승 시간을 짧게 하기 위해서는 파형이 펄스파에 가깝게 바뀌어야 하고, 이렇게 하기 위해서는 다른 주파수를 가지는 여러 개의 파형이 합쳐진 형태라야 가능합니다. 주파수의 대역폭(Bandwidth)이 커야 합니다.
펄스파가 되려면 주파수 대역폭이 커야
펄스파(Pulse Wave)는 우리말로 구형파(矩形波)라고 하며 아래와 같이 사각형 모양의 파형을 말합니다.
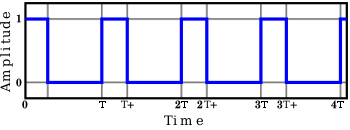
구형파(矩形波)의 구(矩)는 목수들이 가지고 다녔던 기역자 모양의 '곱자'를 가리키는 한자로 '네모지다'라는 뜻을 가집니다. 따라서, '네모진 형태의 파'입니다.
사인파(sine wave)로부터 펄스파를 만들려면, 사인파의 기본파에 모든 고조파(高調波, harmonic)를 합하면 만들어집니다.
고조파(高調波)는 고주파가 아닙니다. 주파수가 큰 것을 얘기하지 않습니다.
고조파는, 기본 주파수의 정수배가 되는 주파수를 얘기하는 것으로, 모든 주파수를 가지고 있는 어떤 주기적 성분은, 그 주파수의 2배, 3배, 4배,.. 이렇게 정수배가되는 지점에서 원래의 성분과 유사한, 조화로운 특성을 가지고 있습니다.
그래서, 원래 주파수의 정수배가 되는 주파수들을 고조파(高調波, Harmonic)이라고 합니다.

합쳐지는 고조파의 수량이 많아질 수록 점점 더 펄스형에 가깝게 되고 신호의 상승 시간이 빨라집니다.

따라서, 여러 개의 고조파(=기본 주파수의 정수배 주파수를 가지는 파)를 사용할 수 있어야 하기에, 주파수 대역폭이 커야 합니다.
아래 그림은 여러 고조파가 더해질수록 파형이 뾰족해지는 애니메이션입니다.
대역폭과 상승시간(Rise Time)과의 관계식
일반적으로 대역폭과 상승시간의 관계식은 $ {F}_{BW} = 0.35/T_{r}$입니다.
만약 상승 시간이 $1ns$이면 이 파형의 BandWidth는,
$$ F_{BW} = 0.35 / 10^{-9} = 350MHz $$
즉, 상승 시간을 1ns 이하로 줄이려면 Bandwidth가 350MHz 이상이어야 한다는 것.
대역폭과 탐지가능 시간과의 관계
위에서 전파의 상승 시간(Rise Time)이 빨라야 디지털 신호로의 변환 시간이 빠를 수 있고, 상승 시간이 빠르려면 여러 고조파가 합쳐진 펄스파 형태라야 하고, 따라서 주파수의 대역폭이 커야 함을 얘기했습니다.
이에 덧붙여서, 펄스파에 대해서 '펄스의 탐지 구별이 가능함과 시스템 대역폭의 관계'도 있는데 이를 '시간과 대역폭 곱(Time-bandwidth product)'이라고 합니다. (혹은 Pulse-bandwidth product이라고 함)

위 그림에서와 같이, 전송되는 디지털 신호를 측정하기 위해서는 펄스의 피크와 피크 사이를 잴 수 있어야 하고, 이를 위해서는 수신 측에서 전송파의 2배가 되는 주파수로 샘플링을 해야 온전히 전송된 내용을 읽을 수 있습니다. (나이퀴스트 정리 Nyquist Theorem이라 함)
어쨌든 이와 같이 어떤 펄스와 펄스 사이의 시간 간격이 좁아져야 하는데, 이때 이 시간 간격과 대역폭 간에는 상충관계(trade-off)가 있습니다.
이것을 디지털 신호의 주파수와 시간 측정에 대한 '불확정성의 원리(Uncertainty Principle')라고도 하는데, 어떤 파형의 시간 간격과 대역폭과는 상충관계에 있다는 것입니다. 즉, 파형의 시간 간격을 길게하면서 대역폭도 크게 할 수 없다는 것입니다.
이를 수식으로 나타내면,
$$ \Delta t\cdot \Delta f\ge k $$
시간 간격($\Delta$)과 대역폭($\Delta f$)의 곱이 어떤 상수($k$) 보다 항상 크다는 것으로, 시간 간격을 작게 하려면 대역폭이 커져야 합니다.
즉, 우리가 원하는 세밀한 시간 간격을 원한다면 대역폭($\Delta f$)이 커져야 하는 것입니다.
따라서, 어떤 두 지점 간의 거리를, 신호의 시간과 속도를 이용해서 계산하고자 할 때는, 그 신호의 시간 간격이 좁아야 하고, 그러려면 대역폭이 커져야 하는 것으로, 이 때문에 광대역폭을 가지는 UWB가 세밀한 거리측정을 할 수 있는 것입니다.
- (UWB 분석 1) 끝-
'Information > IT 관련' 카테고리의 다른 글
| UWB(Ultra Wide Band, 초광대역) 기술 분석(2/2) (0) | 2020.07.11 |
|---|---|
| [Tistory Tip]티스토리에 LaTex 수식 복사했는데 제대로 출력안되는 경우 (0) | 2020.06.21 |
| Tistory 없애기: 티스토리 블로그에 복사/붙여넣기 했을 때 생기는 공백문자 없애기 (0) | 2020.06.11 |
| 파이썬으로 동영상 만들기 ? (0) | 2020.05.13 |


